–§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç • –ü—Ä–æ—Å–º–æ—Ç—Ä —Ç–µ–º—ã - —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–°–æ–æ–±—â–µ–Ω–∏—è –±–µ–∑ –æ—Ç–≤–µ—Ç–æ–≤ | –ê–∫—Ç–∏–≤–Ω—ã–µ —Ç–µ–º—ã
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 1 –∏–∑ 1
[ –°–æ–æ–±—â–µ–Ω–∏–π: 19 ]
–ê–≤—Ç–æ—Ä
–°–æ–æ–±—â–µ–Ω–∏–µ
sanitar_zaz
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –∏—é–Ω 03, 2024 22:55:05
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 13, 2024 04:32:14–°–æ–æ–±—â–µ–Ω–∏–π: 37
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–¥–æ–±—Ä—ã–π –¥–µ–Ω—å –≤—Å–µ–º.—Å—Ä–∞–∑—É –≥–æ–≤–æ—Ä—é,–≤–æ–∑–º–æ–∂–Ω–æ —è –≤—ã–±—Ä–∞–ª –Ω–µ –≤–µ—Ä–Ω—ã–π —Ä–∞–∑–¥–µ–ª,–Ω–æ –Ω–µ —É–≤–∏–¥–µ–ª —Ä–∞–∑–¥–µ–ª–∞ –ø–æ –∫–æ–¥–∏–Ω–≥—É.
–∏—Ç–∞–∫,
–∑–∞–¥–∞—á–∞ :
–∏–∑ –∏–≥—Ä–æ–≤–æ–≥–æ —Ä—É–ª—è –Ω–∞ 270 –≥—Ä–∞–¥—É—Å–æ–≤ —Å–¥–µ–ª–∞—Ç—å —Ä—É–ª—å —Å –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—å—é –∏–∑–º–µ–Ω–µ–Ω–∏—è —É–≥–ª–∞
—Ä–µ–∞–ª–∏–∑–∞—Ü–∏—è —è –≤–∑—è–ª —Ä—É–ª—å Thrustmaster Rallye GT Force Feedback Clutch,–≤—ã–Ω—É–ª –∏–∑ –Ω–µ–≥–æ –ø–æ—Ç–µ–Ω—Ü–∏–æ–º–µ—Ç—Ä,–ø–æ—Å—Ç–∞–≤–∏–ª –≤–º–µ—Å—Ç–æ –Ω–µ–≥–æ –∞–±—Å–æ–ª—é—Ç–Ω—ã–π —ç–Ω–∫–æ–¥–µ—Ä BOURNS EAW0J-B24-AE0128L
–µ–≥–æ –ø–æ–∫–∞–∑–∞–Ω–∏—è –ø–æ–ª—É—á–∞—é –≤ atmega8,—Å—á–∏—Ç–∞—é –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ –ø—Ä–æ–π–¥–µ–Ω–Ω—ã—Ö –ø–∏–Ω–æ–≤ –∏ —É–º–Ω–æ–∂–∞—é –∏—Ö –Ω–∞ –º–Ω–æ–∂–∏—Ç–µ–ª—å(–ø—Ä–æ –Ω–µ–≥–æ –¥–∞–ª—å—à–µ) –¥–ª—è –ø–æ–ª—É—á–µ–Ω–∏—è –∑–Ω–∞—á–µ–Ω–∏—è,–∫–æ—Ç–æ—Ä–æ–µ —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞—é –≤ OCR1A
–ø—Ä–æ –º–Ω–æ–∂–∏—Ç–µ–ª—å –¥–ª—è –Ω–∞—á–∞–ª–∞ –Ω–∞–¥–æ –ø–æ–≤—Ç–æ—Ä–∏—Ç—å –±–∞–∑–æ–≤—É—é —Ä–µ–∞–ª–∏–∑–∞—Ü–∏—é —É–≥–ª–∞ –≤ 270 –≥—Ä–∞–¥—É—Å–æ–≤.—É —ç–Ω–∫–æ–¥–µ—Ä–∞ –ø–æ–∑–∏—Ü–∏–∏ 0-127,—Ç.–µ. 360 –≥—Ä–∞–¥—É—Å–æ–≤ —Ä–∞–≤–Ω—è–µ—Ç—Å—è 128 –ø–∏–Ω–∞–º.–ø—Ä–æ—Å—Ç–æ–π –º–∞—Ç–µ–º–∞—Ç–∏–∫–æ–π –ø–æ–ª—É—á–∞–µ–º —á—Ç–æ —É–≥–æ–ª 270 –≥—Ä–∞–¥—É—Å–æ–≤ —ç—Ç–æ 96 –ø–∏–Ω–æ–≤.–µ—â—ë —Ä–∞–∑ —Å—á–∏—Ç–∞–µ–º –∏ –ø–æ–ª—É—á–∞–µ–º —á—Ç–æ 1 –ø–∏–Ω —Ä–∞–≤–Ω—è–µ—Ç—Å—è 2.83 –≥—Ä–∞–¥—É—Å–∞.–≤–æ—Ç —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω–æ –º–Ω–æ–∂–∏—Ç–µ–ª—å –∏ —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ–º –≤ 2.83
–Ω–æ –ø—Ä–∞–∫—Ç–∏–∫–∞ –ø–æ–∫–∞–∑–∞–ª–∞ —á—Ç–æ 2.83 —ç—Ç–æ –∏ –±–ª–∏–∑–∫–æ –Ω–µ —Ç–æ –∑–Ω–∞—á–µ–Ω–∏–µ.—Ä–µ–∞–ª—å–Ω–æ —è —Å–µ–π—á–∞—Å –ø–æ–¥–æ–±—Ä–∞–ª —á—Ç–æ –ø—Ä–∏–º–µ—Ä–Ω–æ 5.5 —ç—Ç–æ –±–ª–∏–∑–∫–æ–µ –∑–Ω–∞—á–µ–Ω–∏–µ,–Ω–æ –∏ —Ç–æ —ç—Ç–æ –µ—â—ë –Ω–µ –æ–Ω–æ.
—ç—Ç–æ –ø—Ä–æ–±–ª–µ–º–∞ –Ω–æ–º–µ—Ä —Ä–∞–∑ –∞ –ø—Ä–æ–±–ª–µ–º–∞ –Ω–æ–º–µ—Ä –¥–≤–∞ —ç—Ç–æ —Ç–æ —á—Ç–æ –æ–Ω–æ –≤—ã—Ö–æ–¥–∏—Ç –Ω–∞ –∫—Ä–∞–π–Ω–µ–µ –ª–µ–≤–æ–µ –∏ –∫—Ä–∞–π–Ω–µ–µ –ø—Ä–∞–≤–æ–µ –∑–Ω–∞—á–µ–Ω–∏–µ –ø—Ä–∏ –∞–±—Å–æ–ª—é—Ç–Ω–æ —Ä–∞–∑–Ω—ã—Ö –∑–Ω–∞—á–µ–Ω–∏—è—Ö –ø—Ä–æ–π–¥–µ–Ω–Ω—ã—Ö –ø–∏–Ω–æ–≤.—É —Ä—É–ª—è –µ—Å—Ç—å —à—Ç–∞—Ç–Ω–∞—è –ø—Ä–æ–≥–∞ –¥–ª—è –∫–∞–ª–∏–±—Ä–æ–≤–∫–∏,–≥–¥–µ –Ω–∞–≥–ª—è–¥–Ω–æ –º–æ–∂–Ω–æ –Ω–∞–±–ª—é–¥–∞—Ç—å –∫—É–¥–∞ —è –µ–≥–æ –ø–æ–≤–æ—Ä–∞—á–∏–≤–∞—é
—è –¥–æ–±–∞–≤–∏–ª –∫–Ω–æ–ø–∫—É –ø—Ä–æ–≥—Ä–∞–º–Ω–æ–π —Ü–µ–Ω—Ç—Ä–æ–≤–∫–∏ —Ä—É–ª—è,–∏ –ø—Ä–æ–±–æ–≤–∞–ª —Ü–µ–Ω—Ç—Ä–æ–≤–∞—Ç—å –Ω–æ—Ä–º–∞–ª—å–Ω–æ,–ø–æ–≤—ë—Ä–Ω—É—Ç—ã–º –≤–ø—Ä–∞–≤–æ,–ø–æ–≤—ë—Ä–Ω—É—Ç—ã–º –≤–ª–µ–≤–æ –∏ –ø–æ–≤—ë—Ä–Ω—É—Ç—ã–º –Ω–∞ 180 –≥—Ä–∞–¥—É—Å–æ–≤.–≤–æ–æ–±—â–µ —Ä–∞–∑–Ω–æ–µ –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ –ø–∏–Ω–æ–≤ –æ—Ç –∫—Ä–∞–π–Ω–µ–≥–æ –ª–µ–≤–æ–≥–æ –¥–æ –∫—Ä–∞–π–Ω–µ–≥–æ –ø—Ä–∞–≤–æ–≥–æ –ø–æ–ª–æ–∂–µ–Ω–∏—è.–∑–∞ —Å–µ—Ä–µ–¥–∏–Ω—É –ø—Ä–∏ —Ü–µ–Ω—Ç—Ä–æ–≤–∫–µ –≤—Å–µ–≥–¥–∞ –∑–∞–¥–∞—ë—Ç—Å—è 48 –ø–∏–Ω–æ–≤(—è–∫–æ–±—ã —É–∂–µ –ø—Ä–æ–π–¥–µ–Ω–æ)-–ø–æ—Ç–æ–º—É —á—Ç–æ 96\2:
–¶–∏—Ç–∞—Ç–∞:
–∫—Ä–∞–π–Ω–µ–µ –ª–µ–≤–æ–µ: —Ñ–∏–∑–∏—á–µ—Å–∫–∏–π –ø–∏–Ω:114 –ø–∏–Ω–æ–≤ –ø—Ä–æ–π–¥–µ–Ω–æ –æ—Ç 0:24 –∑–Ω–∞—á–µ–Ω–∏–µ OCR1A:132 –∫—Ä–∞–π–Ω–µ–µ –ø—Ä–∞–≤–æ–µ: —Ñ–∏–∑–∏—á–µ—Å–∫–∏–π –ø–∏–Ω:38 –ø–∏–Ω–æ–≤ –ø—Ä–æ–π–¥–µ–Ω–æ –æ—Ç 0:76 –∑–Ω–∞—á–µ–Ω–∏–µ OCR1A:418–∫—Ä–∞–π–Ω–µ–µ –ª–µ–≤–æ–µ: —Ñ–∏–∑–∏—á–µ—Å–∫–∏–π –ø–∏–Ω:11 –ø–∏–Ω–æ–≤ –ø—Ä–æ–π–¥–µ–Ω–æ –æ—Ç 0:21 –∑–Ω–∞—á–µ–Ω–∏–µ OCR1A:115 –∫—Ä–∞–π–Ω–µ–µ –ø—Ä–∞–≤–æ–µ: —Ñ–∏–∑–∏—á–µ—Å–∫–∏–π –ø–∏–Ω:69 –ø–∏–Ω–æ–≤ –ø—Ä–æ–π–¥–µ–Ω–æ –æ—Ç 0:79 –∑–Ω–∞—á–µ–Ω–∏–µ OCR1A:434–∫—Ä–∞–π–Ω–µ–µ –ª–µ–≤–æ–µ: —Ñ–∏–∑–∏—á–µ—Å–∫–∏–π –ø–∏–Ω:121 –ø–∏–Ω–æ–≤ –ø—Ä–æ–π–¥–µ–Ω–æ –æ—Ç 0:22 –∑–Ω–∞—á–µ–Ω–∏–µ OCR1A:121 –∫—Ä–∞–π–Ω–µ–µ –ø—Ä–∞–≤–æ–µ: —Ñ–∏–∑–∏—á–µ—Å–∫–∏–π –ø–∏–Ω:69 –ø–∏–Ω–æ–≤ –ø—Ä–æ–π–¥–µ–Ω–æ –æ—Ç 0:98 –∑–Ω–∞—á–µ–Ω–∏–µ OCR1A:539
—Ä–∞–∑–±—Ä–æ—Å –º—è–≥–∫–æ –≥–æ–≤–æ—Ä—è –±—Ä–µ–¥–æ–≤—ã–π.
—è –Ω–µ –º–æ–≥—É –ø–æ–Ω—è—Ç—å —á–µ–º —ç—Ç–æ –æ–±—É—Å–ª–æ–≤–ª–µ–Ω–æ.–≤–ø–æ–ª–Ω–µ –¥–æ–ø—É—Å–∫–∞—é —á—Ç–æ —è —á—Ç–æ-—Ç–æ –Ω–µ –ø—Ä–∞–≤–∏–ª—å–Ω–æ —É–∫–∞–∑–∞–ª –≤ –Ω–∞—Å—Ç—Ä–æ–π–∫–∞—Ö –®–ò–ú–∞,–ø–æ—ç—Ç–æ–º—É —è —É–∂–µ –∑–∞–º–∞—Ö–∞–ª—Å—è –∏—Å–∫–∞—Ç—å —Å–∞–º –ø—Ä–æ–±–ª–µ–º—É,–ø—Ä–æ—à—É –ø–æ–º–æ—â–∏ —É –±–æ–ª–µ–µ –æ–ø—ã—Ç–Ω—ã—Ö –ª—é–¥–µ–π.–Ω–∏–∂–µ –∫–æ–¥ –ø—Ä–æ–≥–∏,–≤ –Ω–µ–π –º–Ω–æ–≥–æ –æ—Ç–ª–∞–¥–æ—á–Ω–æ–≥–æ –∫–æ–¥–∞,—Ç–æ—Ç-–∂–µ –≤—ã–≤–æ–¥ –ø–æ–∫–∞–∑–∞–Ω–∏–π –Ω–∞ —Ç—Ä—ë—Ö—Ü–∏—Ñ–µ—Ä–Ω—ã–π —Å–µ–º–∏—Å–µ–≥–º–µ–Ω—Ç–Ω—ã–π –∏–Ω–¥–∏–∫–∞—Ç–æ—Ä –ø—Ä–∏—à–ª–æ—Å—å —Å–¥–µ–ª–∞—Ç—å,—á—Ç–æ–± —É–≤–∏–¥–µ—Ç—å –≤ –∂–µ–ª–µ–∑–µ –∫–∞–∫ –æ–Ω–æ —Å—á–∏—Ç–∞–µ—Ç.
HELP –ö–æ–¥:
/*
–î–æ–±–∞–≤–ª–µ–Ω–æ after 14 minutes 4 seconds: –¥–∞.—Å–æ–≤—Å–µ–º –∑–∞–±—ã–ª,–º–æ–≥—É –¥–∞—Ç—å –ø—Ä–æ–µ–∫—Ç –≤ –ø—Ä–æ—Ç–µ—É—Å–µ.—Ö–æ—Ç—è –Ω–µ –∑–Ω–∞—é –Ω—É–∂–µ–Ω-–ª–∏,–≤–µ–¥—å –ø–æ –∂–µ–ª–µ–∑—É –≤—Å—ë —Ä–∞–±–æ—Ç–∞–µ—Ç.
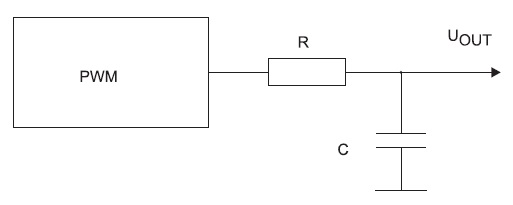
UPD2:–∞ –º–æ–∂–µ—Ç –∏ –≤ –∂–µ–ª–µ–∑–µ.–Ω–∞ –Ω–æ–≥–µ –®–ò–ú–∞ –µ—â—ë —Å—Ç–æ–∏—Ç –§–ù–ß —Ç–∞–∫–æ–≥–æ —Ç–∏–ø–∞,–∏ —Ç–æ–ª—å–∫–æ –ø–æ—Å–ª–µ —ç—Ç–æ–≥–æ –∏–¥—ë—Ç —É–∂–µ –ø–∏—Ç–∞–Ω–∏–µ –≤ —É–ø—Ä–∞–≤–ª—è—é—â—É—é —Å—Ö–µ–º—É —Ä—É–ª—è
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
sanitar_zaz
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –∏—é–Ω 06, 2024 00:31:09
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 13, 2024 04:32:14–°–æ–æ–±—â–µ–Ω–∏–π: 37
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–≤—Å–µ–º —Å–ø–∞—Å–∏–±–æ,—Ç–µ–º—É –º–æ–∂–Ω–æ —É–¥–∞–ª—è—Ç—å))))
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
Jack_A
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –∏—é–Ω 06, 2024 07:28:19
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 62
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 889
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –∞–ø—Ä 24, 2007 07:45:40–°–æ–æ–±—â–µ–Ω–∏–π: 6215–û—Ç–∫—É–¥–∞: Minsk
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ù—É –≤–æ—Ç - —Ç–æ–ª—å–∫–æ –∑–∞–∏–Ω—Ç–µ—Ä–µ—Å–æ–≤–∞–ª - –∏ —Å—Ä–∞–∑—É —É–¥–∞–ª—è—Ç—å. –ü–æ–¥–µ–ª–∏–ª—Å—è –±—ã.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Martian
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –∏—é–Ω 06, 2024 08:29:39
–ö–∞—Ä–º–∞: 67
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1964
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –¥–µ–∫ 18, 2021 19:25:32–°–æ–æ–±—â–µ–Ω–∏–π: 12867
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
—Ç–∞–∫ –æ–Ω –ø–æ–¥–µ–ª–∏–ª—Å—è... –ø—Ä–∏–º–µ—Ä–æ–º, –∫–∞–∫ –Ω–µ –Ω–∞–¥–æ –ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä–æ–≤–∞—Ç—å. –∏ –ø—Ä–æ–µ–∫—Ç–∏—Ä–æ–≤–∞—Ç—å. –¢–∞–∫ –ø–µ—Ä–µ–º–µ—à–∞—Ç—å —ç–Ω–∫–æ–¥–µ—Ä –∏ –∏–Ω–¥–∏–∫–∞—Ç–æ—Ä, –∏ –∑–∞—Ç–µ–º –ø—Ä–µ–æ–¥–æ–ª–µ–≤–∞—Ç—å —Ç—Ä—É–¥–Ω–æ—Å—Ç–∏ - —ç—Ç–æ –Ω–∞–¥–æ –ø–æ—Å—Ç–∞—Ä–∞—Ç—å—Å—è. –ê –≤–µ–¥—å –≤—Å—è –ø—Ä–æ–≥—Ä–∞–º–º–∞ –º–æ–≥–ª–∞ —Å–≤–µ—Å—Ç–∏—Ç—å –∫ –ø–æ–ª—Å–æ—Ç–Ω–∏ —Å—Ç—Ä–æ—á–µ–∫...
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
sanitar_zaz
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –∏—é–Ω 09, 2024 17:04:26
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 13, 2024 04:32:14–°–æ–æ–±—â–µ–Ω–∏–π: 37
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–¢–∞–∫ –ø–µ—Ä–µ–º–µ—à–∞—Ç—å —ç–Ω–∫–æ–¥–µ—Ä –∏ –∏–Ω–¥–∏–∫–∞—Ç–æ—Ä
–µ—Å–ª–∏ –± –≤—ã –≤–Ω–∏–º–∞—Ç–µ–ª—å–Ω–æ —á–∏—Ç–∞–ª–∏-—Ç–æ —É–≤–∏–¥–µ–ª–∏ –± —á—Ç–æ –∏–Ω–¥–∏–∫–∞—Ç–æ—Ä —Ç—É–¥–∞ –¥–æ–±–∞–≤–ª–µ–Ω –¥–ª—è –æ—Ç–ª–∞–¥–∫–∏.–≤ —Ä–∞–±–æ—á–µ–º –≤–∞—Ä–∏–∞–Ω—Ç–µ –æ–Ω –≤–æ–æ–±—â–µ —Ç–∞–º –Ω–µ –Ω—É–∂–µ–Ω.
–¶–∏—Ç–∞—Ç–∞:
–ù—É –≤–æ—Ç - —Ç–æ–ª—å–∫–æ –∑–∞–∏–Ω—Ç–µ—Ä–µ—Å–æ–≤–∞–ª - –∏ —Å—Ä–∞–∑—É —É–¥–∞–ª—è—Ç—å. –ü–æ–¥–µ–ª–∏–ª—Å—è –±—ã.
–≤–µ—Å—å –ø—Ä–∏–∫–æ–ª –æ–∫–∞–∑–∞–ª—Å—è –≤ —Ç–æ–º,—á—Ç–æ —Ä–æ–¥–Ω–∞—è —Å—Ö–µ–º–∞ —Ä—É–ª—è –∂–¥–∞–ª–∞ –æ—Ç —ç–Ω–∫–æ–¥–µ—Ä–∞ –∑–Ω–∞—á–µ–Ω–∏—è –Ω–µ –æ—Ç 0–í(–∫—Ä–∞–π–Ω–µ–µ –ª–µ–≤–æ–µ –ø–æ–ª–æ–∂–µ–Ω–∏–µ) –¥–æ 4.9–í(–∫—Ä–∞–π–Ω–µ–µ –ø—Ä–∞–≤–æ–µ),–∞ –æ—Ç 0.15–í –¥–æ 3.85–í,—Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–µ–Ω–Ω–æ –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤—ã–≤–∞—è –∑–Ω–∞—á–µ–Ω–∏—è –≤ —É–≥–æ–ª –ø–æ–≤–æ—Ä–æ—Ç–∞ —Ä—É–ª—è.
—è –ø–æ–¥–ø–∞—è–ª—Å—è –∫ –ø–æ—Ç–µ–Ω—Ü–∏–æ–º–µ—Ç—Ä—É –≤ –ø–µ–¥–∞–ª—è—Ö,–∏ —Å–Ω–∏–º–∞–ª —Å –Ω–µ–≥–æ –ø–æ–∫–∞–∑–∞–Ω–∏—è –≤–æ–ª—å—Ç–∞–∂–∞,–Ω–∞–∂–∏–º–∞—è –ø–µ–¥–∞–ª—å –∏ –≥–ª—è–¥—è –∫–∞–∫ —Ä—É–ª—å –∫—Ä—É—Ç–∏—Ç—Å—è –≤ –ø—Ä–æ–≥—Ä–∞–º–º–µ —Ç–µ—Å—Ç–∏—Ä–æ–≤–∞–Ω–∏—è.—Å–Ω—è–ª —Ç–∞–±–ª–∏—Ü—É –ø–æ–∫–∞–∑–∞–Ω–∏–π –ø—Ä–∏ —Ä–∞–∑–Ω—ã—Ö —É–≥–ª–∞—Ö.
–≤–æ–∑–º–æ–∂–Ω–∞ –Ω–µ–∫–æ—Ç–æ—Ä–∞—è –ø–æ–≥—Ä–µ—à–Ω–æ—Å—Ç—å,–Ω–æ –≤ —Ü–µ–ª–æ–º –≤–∏–¥–Ω–æ –±–æ–ª–µ–µ-–º–µ–Ω–µ–µ –ª–∏–Ω–µ–π–Ω–æ–µ –∏–∑–º–µ–Ω–µ–Ω–∏–µ —É–º–µ–Ω—å—à–µ–Ω–∏—è —à–∞–≥–∞ –º–Ω–æ–∂–∏—Ç–µ–ª—è –ø–æ –º–µ—Ä–µ —É–≤–µ–ª–∏—á–µ–Ω–∏—è —É–≥–ª–∞ –ø–æ–≤–æ—Ä–æ—Ç–∞.–æ—Å—Ç–∞–ª–æ—Å—å –æ–±–µ—Ä–Ω—É—Ç—å —ç—Ç–æ –≤ —Ñ–æ—Ä–º—É–ª—É.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
sanitar_zaz
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –∏—é–Ω 17, 2024 23:10:45
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 13, 2024 04:32:14–°–æ–æ–±—â–µ–Ω–∏–π: 37
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
—á—Ç–æ-—Ç–æ –Ω–µ –º–æ–≥—É —è –ø–æ–¥–æ–±—Ä–∞—Ç—å –ø–∞—Ä–∞–º–µ—Ç—Ä—ã –®–ò–ú–∞.–ø—Ä–æ–±–æ–≤–∞–ª –∏ —Ç–æ–ª—å–∫–æ –ø–æ –¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç–∏ –∏–º–ø—É–ª—å—Å–∞ –ø–æ–¥–±–∏—Ä–∞—Ç—å —à–∞–≥,–∏ —Å—Ä–∞–∑—É –ø–æ —á–∞—Å—Ç–æ—Ç–µ –µ—â—ë-–Ω–µ –ø–æ–ª—É—á–∞–µ—Ç—Å—è.
–Ω–µ –º–æ–≥—É –ø–æ–Ω—è—Ç—å –Ω–∞ —á—Ç–æ —É–º–Ω–æ–∂–∞—Ç—å –∫–æ–ª–∏—á–µ—Å—Ç–≤–æ –ø—Ä–æ–π–¥–µ–Ω–Ω—ã—Ö –ø–∏–Ω–æ–≤,–¥–ª—è –ø–æ–ª—É—á–µ–Ω–∏—è –Ω—É–∂–Ω–æ–≥–æ —Ç–æ–∫–∞.
–º–æ–∂–µ—Ç —É –∫–æ–≥–æ –≥–æ–ª–æ–≤–∞ —Å–≤–µ—Ç–ª–µ–µ –º–æ–µ–π,–∏ –Ω–∞–∫–∏–Ω–µ—Ç –∏–¥–µ—é –∫–∞–∫ —ç—Ç–æ –ø–æ—Å—á–∏—Ç–∞—Ç—å?
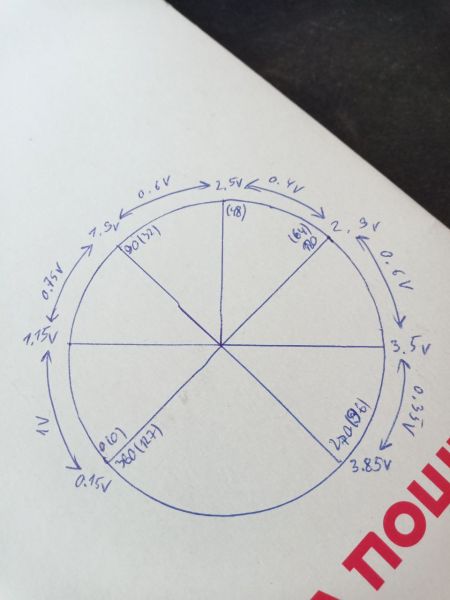
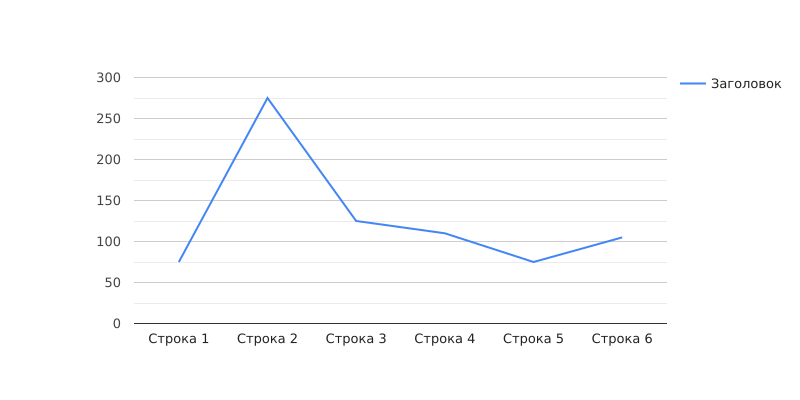
—è –≤—ã–≤–µ–ª —É—Å—Ä–µ–¥–Ω—ë–Ω–æ —á—Ç–æ 45 –≥—Ä–∞–¥—É—Å–æ–≤ —ç—Ç–æ 0.96–í,90 –≥—Ä–∞–¥—É—Å–æ–≤ —ç—Ç–æ 1.85–í,135 —ç—Ç–æ 2.47–í,180 —ç—Ç–æ 2.99–í,225 —ç—Ç–æ 3.34–í,270 —ç—Ç–æ 3.85–í
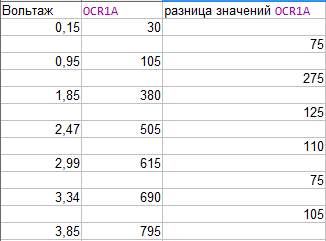
–¥–ª—è –∫—Ä—É–≥–ª–æ—Å—Ç–∏ —Ü–∏—Ñ—Ä –ø–æ—Å—Ç–∞–≤–∏–ª ICR1 –≤ 1000,–Ω–∞–±—Ä–æ—Å–∞–ª –≤–æ—Ç —Ç–∞–±–ª–∏—Ü—É
—Å–æ—Å—Ç–∞–≤–∏–ª –≥—Ä–∞—Ñ–∏–∫ —Ä–∞–∑–Ω–∏—Ü—ã –∑–Ω–∞—á–µ–Ω–∏–π
—ç—Ç–æ –Ω–∏ –Ω–∞ —á—Ç–æ –Ω–µ –ø–æ—Ö–æ–∂–µ –∞–¥–µ–∫–≤–∞—Ç–Ω–æ–µ.
–∫–∞–∫?—Ö–µ–ª–ø.
–ü–æ—Å–ª–µ–¥–Ω–∏–π —Ä–∞–∑ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å sanitar_zaz –í—Ç –∏—é–Ω 18, 2024 00:17:47, –≤—Å–µ–≥–æ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å 1 —Ä–∞–∑.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
Martian
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –∏—é–Ω 18, 2024 00:22:41
–ö–∞—Ä–º–∞: 67
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1964
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –¥–µ–∫ 18, 2021 19:25:32–°–æ–æ–±—â–µ–Ω–∏–π: 12867
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–µ—Å–ª–∏ –± –≤—ã –≤–Ω–∏–º–∞—Ç–µ–ª—å–Ω–æ —á–∏—Ç–∞–ª–∏-—Ç–æ —É–≤–∏–¥–µ–ª–∏ –± —á—Ç–æ –∏–Ω–¥–∏–∫–∞—Ç–æ—Ä —Ç—É–¥–∞ –¥–æ–±–∞–≤–ª–µ–Ω –¥–ª—è –æ—Ç–ª–∞–¥–∫–∏.–≤ —Ä–∞–±–æ—á–µ–º –≤–∞—Ä–∏–∞–Ω—Ç–µ –æ–Ω –≤–æ–æ–±—â–µ —Ç–∞–º –Ω–µ –Ω—É–∂–µ–Ω.
—Ç–æ–≥–¥–∞ –Ω–∞—Ö—Ä–µ–Ω–∞ –µ–≥–æ —Å—é–¥–∞ –±—ã–ª–æ –ø–æ—Å—Ç–∏—Ç—å?
–∏ —Ç–µ–º–∞ —É–¥–∞–ª–µ–Ω–∞, –∑–∞–±—ã–ª?
–î–æ–±–∞–≤–ª–µ–Ω–æ after 8 minutes 11 seconds: –≤–æ–ª—å—Ç–∞–∂, –∫—Ä—É–≥–ª–æ—Å—Ç—å —Ü–∏—Ñ—Ä, –≥—Ä–∞—Ñ–∏–∫ —Ä–∞–∑–Ω–æ—Å—Ç–∏... –ø–æ–π–¥—É —Å–ø–∞—Ç—å, –¥–µ–ª–∞—Ç—å —Ç—É—Ç —è–≤–Ω–æ –Ω–µ—á–µ–≥–æ.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
sanitar_zaz
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –∏—é–Ω 18, 2024 01:25:28
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 13, 2024 04:32:14–°–æ–æ–±—â–µ–Ω–∏–π: 37
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
Martian , –Ω—É –≤–æ—Ç –∫ —á–µ–º—É –≤–µ—Å—å —ç—Ç–æ—Ç –ø–∞—Ñ–æ—Å?–≤–∏–¥–∏—Ç–µ –≥–¥–µ —è –∏–¥—É –Ω–µ –≤ —Ç—É —Å—Ç–æ—Ä–æ–Ω—É-–Ω—É –ø–æ–¥—Å–∫–∞–∂–∏—Ç–µ.
–µ—Å–ª–∏ –≤–∞–º —Ç–∞–∫ —Ü–∞—Ä–∞–ø–∞–µ—Ç –≥–ª–∞–∑ –∏–Ω–¥–∏–∫–∞—Ç–æ—Ä-–≤–æ—Ç –∫–æ–¥ –±–µ–∑ –æ–Ω–æ–≥–æ.
–ö–æ–¥:
/*
—è –≤–µ—Å—å –≤–Ω–∏–º–∞–Ω–∏–µ.
–¶–∏—Ç–∞—Ç–∞:
–≤–æ–ª—å—Ç–∞–∂, –∫—Ä—É–≥–ª–æ—Å—Ç—å —Ü–∏—Ñ—Ä, –≥—Ä–∞—Ñ–∏–∫ —Ä–∞–∑–Ω–æ—Å—Ç–∏
–∏–∏–∏–∏?–≤ —á—ë–º –ø—Ä–æ–±–ª–µ–º–∞?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
sanitar_zaz
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –∏—é–Ω 18, 2024 14:20:59
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 13, 2024 04:32:14–°–æ–æ–±—â–µ–Ω–∏–π: 37
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
—è –∏ —á–µ—Ä–µ–∑ –ø—Ä–æ—Ü–µ–Ω—Ç–Ω–æ–µ —Å–æ–æ—Ç–Ω–æ—à–µ–Ω–∏–µ –ø—Ä–æ–±–æ–≤–∞–ª –≤—ã—á–∏—Å–ª—è—Ç—å.–Ω–∞–ø—Ä–∏–º–µ—Ä:
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
jcxz
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –∏—é–Ω 19, 2024 13:01:05
–ì–æ–≤–æ—Ä—è—â–∏–π —Å —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç–æ–º
–ö–∞—Ä–º–∞: -7
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 187
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –∞–≤–≥ 15, 2017 10:51:13–°–æ–æ–±—â–µ–Ω–∏–π: 1661
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
—è –≤–µ—Å—å –≤–Ω–∏–º–∞–Ω–∏–µ.
–£–∂–æ—Å–Ω–∞—Ö! –í—Ä—è–¥-–ª–∏ –∫—Ç–æ –≤ —Ç–∞–∫–æ–º –±—ã–¥–ª–æ–∫–æ–¥–µ —Ä–∞–∑–±–∏—Ä–∞—Ç—å—Å—è –∑–∞—Ö–æ—á–µ—Ç. –ö–∞—à–∞ –∫–∞–∫–∞—è-—Ç–æ, –∞ –Ω–µ –∫–æ–¥.
–û—Å–æ–±–µ–Ω–Ω–æ —Å —Ç–∞–∫–∏–º–∏ –ø–µ—Ä–ª–∞–º–∏:
–ö–æ–¥:
p[0]=0;
–î–∞ –∏ –æ—Å—Ç–∞–ª—å–Ω–æ–µ –Ω–µ –ª—É—á—à–µ....
–î–æ–±–∞–≤–ª–µ–Ω–æ after 5 minutes 20 seconds: –ö–æ–¥:
//—Å—á–∏—Ç—ã–≤–∞–Ω–∏–µ –ø–æ–∑–∏—Ü–∏–∏ —ç–Ω–∫–æ–¥–µ—Ä–∞ –ø–æ 8 –Ω–æ–≥–∞–º
–ó–¥–µ—Å—å –≤—ã –∫–∞–∫ –±—ã —Å–æ–≤—Å–µ–º –Ω–µ –≤–∏–¥–∏—Ç–µ –ø—Ä–æ–±–ª–µ–º—ã?
–í—Ä–æ–¥–µ –∫–∞–∫ –¥–æ–ª–∂–Ω–æ –±—ã—Ç—å –æ—á–µ–≤–∏–¥–Ω–æ, —á—Ç–æ —Ç–∞–∫–æ–µ "—á—Ç–µ–Ω–∏–µ —ç–Ω–∫–æ–¥–µ—Ä–∞" —Ä–∞–±–æ—Ç–∞—Ç—å –ø—Ä–∞–≤–∏–ª—å–Ω–æ –Ω–µ –º–æ–∂–µ—Ç –≤ –ø—Ä–∏–Ω—Ü–∏–ø–µ.
–£–∂ –Ω–µ –≥–æ–≤–æ—Ä—è –æ —Ç–æ–º, —á—Ç–æ –∞–≤—Ç–æ—Ä –ø–æ—Ö–æ–∂–µ –¥–∞–∂–µ –Ω–µ –∑–Ω–∞–µ—Ç —á—Ç–æ —Ç–∞–∫–æ–µ —Ü–∏–∫–ª—ã....
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
sanitar_zaz
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –∏—é–Ω 19, 2024 16:37:18
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 13, 2024 04:32:14–°–æ–æ–±—â–µ–Ω–∏–π: 37
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–¥–∞–≤–∞–π—Ç–µ —è –∞—Ä–≥—É–º–µ–Ω—Ç–∏—Ä—É—é.–∏—Ç–∞–∫:
–û—Å–æ–±–µ–Ω–Ω–æ —Å —Ç–∞–∫–∏–º–∏ –ø–µ—Ä–ª–∞–º–∏:
–ö–æ–¥:
p[0]=0;
–î–∞ –∏ –æ—Å—Ç–∞–ª—å–Ω–æ–µ –Ω–µ –ª—É—á—à–µ....
—ç—Ç–æ –Ω–∞—á–∞–ª—å–Ω–∞—è –∏–Ω–∏—Ü–∏–∞–ª–∏–∑–∞—Ü–∏—è –∑–Ω–∞—á–µ–Ω–∏–π —ç–ª–µ–º–µ–Ω—Ç–æ–≤ –º–∞—Å—Å–∏–≤–∞.–æ—Å—Ç–∞–≤–ª—è—Ç—å –ø–µ—Ä–µ–º–µ–Ω–Ω—ã–µ –±–µ–∑ –Ω–∞—á–∞–ª—å–Ω–æ–≥–æ –∑–Ω–∞—á–µ–Ω–∏—è,"–Ω–∞ –∞–≤–æ—Å—å"-–µ—â—ë –±–æ–ª—å—à–∏–π –±—ã–¥–ª–æ–∫–æ–¥–∏–Ω–≥.
–ö–æ–¥:
//—Å—á–∏—Ç—ã–≤–∞–Ω–∏–µ –ø–æ–∑–∏—Ü–∏–∏ —ç–Ω–∫–æ–¥–µ—Ä–∞ –ø–æ 8 –Ω–æ–≥–∞–º
–ó–¥–µ—Å—å –≤—ã –∫–∞–∫ –±—ã —Å–æ–≤—Å–µ–º –Ω–µ –≤–∏–¥–∏—Ç–µ –ø—Ä–æ–±–ª–µ–º—ã?
–í—Ä–æ–¥–µ –∫–∞–∫ –¥–æ–ª–∂–Ω–æ –±—ã—Ç—å –æ—á–µ–≤–∏–¥–Ω–æ, —á—Ç–æ —Ç–∞–∫–æ–µ "—á—Ç–µ–Ω–∏–µ —ç–Ω–∫–æ–¥–µ—Ä–∞" —Ä–∞–±–æ—Ç–∞—Ç—å –ø—Ä–∞–≤–∏–ª—å–Ω–æ –Ω–µ –º–æ–∂–µ—Ç –≤ –ø—Ä–∏–Ω—Ü–∏–ø–µ.
–£–∂ –Ω–µ –≥–æ–≤–æ—Ä—è –æ —Ç–æ–º, —á—Ç–æ –∞–≤—Ç–æ—Ä –ø–æ—Ö–æ–∂–µ –¥–∞–∂–µ –Ω–µ –∑–Ω–∞–µ—Ç —á—Ç–æ —Ç–∞–∫–æ–µ —Ü–∏–∫–ª—ã....
–æ—á–µ–≤–∏–¥–Ω–æ?—á—Ç–æ –∂,–¥–∞–≤–∞–π—Ç–µ –æ–±—Ä–∞—Ç–∏–º—Å—è –∫ –¥–∞—Ç–∞—à–∏—Ç—É –Ω–∞ —ç–Ω–∫–æ–¥–µ—Ä:
–∫–∞–∂–¥—ã–π –ø—Ä–æ—Ö–æ–¥ –æ—Å–Ω–æ–≤–Ω–æ–≥–æ —Ü–∏–∫–ª–∞ –ø—Ä–æ–≥—Ä–∞–º–º—ã –æ–ø—Ä–∞—à–∏–≤–∞–µ–º 7 –Ω–æ–≥ –º–∏–∫—Ä—É—Ö–∏,—á—Ç–æ–± –∑–Ω–∞—Ç—å –Ω–∏–∑–∫–æ–µ/–≤—ã—Å–æ–∫–æ–µ –∑–Ω–∞—á–µ–Ω–∏–µ —Å–µ–π—á–∞—Å –Ω–∞ –∫–∞–∂–¥–æ–º –ø–∏–Ω–µ,—Å–æ–±—Ä–∞—Ç—å —ç—Ç–æ –∑–Ω–∞—á–µ–Ω–∏–µ –≤ –¥–≤–æ–∏—á–Ω—ã–π –∫–æ–¥ –∏ –¥–∞–ª—å—à–µ –ø–æ —Ç–∞–±–ª–∏—Ü–µ –ø–æ–ª—É—á–∏—Ç—å –ø–æ–∑–∏—Ü–∏—é —ç–Ω–∫–æ–¥–µ—Ä–∞.
–Ω–µ—Ç,—è –Ω–µ –≤–∏–∂—É –ø—Ä–æ–±–ª–µ–º –≤ —Ç–æ–º —á—Ç–æ —è –Ω–∞–ø–∏—Å–∞–ª.
–µ—Å–ª–∏ –≤—ã –∑–Ω–∞–µ—Ç–µ –∫–∞–∫ –ø–æ-–¥—Ä—É–≥–æ–º—É —Ä–µ—à–∏—Ç—å —ç—Ç—É –∑–∞–¥–∞—á—É-–ø–æ–¥–µ–ª–∏—Ç–µ—Å—å –ø–æ–∂–∞–ª—É–π—Å—Ç–∞,–º–Ω–µ –±—É–¥–µ—Ç –∏–Ω—Ç–µ—Ä–µ—Å–Ω–æ(–±–µ–∑ —Å–∞—Ä–∫–∞–∑–º–∞)
–∏ –µ—Å–ª–∏ —á—Ç–æ-–∏–Ω–¥–∏–∫–∞—Ç–æ—Ä –ø–æ–∫–∞–∑–∞–ª —á—Ç–æ –∫–æ–¥ –æ–ø—Ä–µ–¥–µ–ª–µ–Ω–∏—è –ø–æ–∑–∏—Ü–∏–∏ —ç–Ω–∫–æ–¥–µ—Ä–∞ —Ä–∞–±–æ—Ç–∞–µ—Ç –≤–µ—Ä–Ω–æ.–ø—Ä–æ–±–ª–µ–º–∞ –¥–∞–ª—å—à–µ,—Å –®–ò–ú.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Starichok51
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –∏—é–Ω 19, 2024 16:51:03
–ú–æ–¥–µ—Ä–∞—Ç–æ—Ä
–ö–∞—Ä–º–∞: 153
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2927
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –∞–≤–≥ 14, 2010 15:05:51–°–æ–æ–±—â–µ–Ω–∏–π: 18893–û—Ç–∫—É–¥–∞: –≥. –û–∑–µ—Ä—Å–∫, –ß–µ–ª—è–±–∏–Ω—Å–∫–∞—è –æ–±–ª.
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 6
–ú–µ–¥–∞–ª–∏: 1
–∞ –ø—Ä–æ—á–∏—Ç–∞—Ç—å —Å—Ä–∞–∑—É –í–ï–°–¨ –ø–æ—Ä—Ç –∏ —Å—Ä–∞–∑—É –ø–æ–ª—É—á–∏—Ç—å –¥–≤–æ–∏—á–Ω—ã–π –∫–æ–¥ —É–º–∞ –Ω–µ —Ö–≤–∞—Ç–∞–µ—Ç?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
jcxz
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –∏—é–Ω 19, 2024 17:38:39
–ì–æ–≤–æ—Ä—è—â–∏–π —Å —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç–æ–º
–ö–∞—Ä–º–∞: -7
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 187
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –∞–≤–≥ 15, 2017 10:51:13–°–æ–æ–±—â–µ–Ω–∏–π: 1661
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 4
—ç—Ç–æ –Ω–∞—á–∞–ª—å–Ω–∞—è –∏–Ω–∏—Ü–∏–∞–ª–∏–∑–∞—Ü–∏—è –∑–Ω–∞—á–µ–Ω–∏–π —ç–ª–µ–º–µ–Ω—Ç–æ–≤ –º–∞—Å—Å–∏–≤–∞.–æ—Å—Ç–∞–≤–ª—è—Ç—å –ø–µ—Ä–µ–º–µ–Ω–Ω—ã–µ –±–µ–∑ –Ω–∞—á–∞–ª—å–Ω–æ–≥–æ –∑–Ω–∞—á–µ–Ω–∏—è,"–Ω–∞ –∞–≤–æ—Å—å"-–µ—â—ë –±–æ–ª—å—à–∏–π –±—ã–¥–ª–æ–∫–æ–¥–∏–Ω–≥
–í–æ-–ø–µ—Ä–≤—ã—Ö: –ò—Å—Ö–æ–¥—è –∏–∑ —Ç–æ–≥–æ –∫–∞–∫ –≤—ã –∏—Å–ø–æ–ª—å–∑—É–µ—Ç–µ —Ç–æ—Ç –º–∞—Å—Å–∏–≤, –µ–≥–æ –≤–ø–æ–ª–Ω–µ –º–æ–∂–Ω–æ —Å–¥–µ–ª–∞—Ç—å —Å—Ç–∞—Ç–∏—á–µ—Å–∫–∏–º. –ê —Å—Ç–∞—Ç–∏—á–µ—Å–∫–∏–µ –ø–µ—Ä–µ–º–µ–Ω–Ω—ã–µ –∏–Ω–∏—Ü–∏–∞–ª–∏–∑—É—Ä—É—é—Ç—Å—è –Ω—É–ª—è–º–∏ —Å–∏—à–Ω—ã–º —Å—Ç–∞—Ä—Ç–∞–ø-–∫–æ–¥–æ–º. –î–æ—Å—Ç–∞—Ç–æ—á–Ω–æ –æ–±—ä—è–≤–∏—Ç—å –º–∞—Å—Å–∏–≤ –∫–∞–∫:
static int p[8] = {0}; –≤—Å—ë. –ò –∫–æ–¥–∞ –Ω–∏–∫–∞–∫–æ–≥–æ –≤ main() –Ω–µ –Ω–∞–¥–æ.
–ê –µ—Å–ª–∏ –Ω—É–∂–Ω–∞ –∏–º–µ–Ω–Ω–æ –∞–≤—Ç–æ–º–∞—Ç–∏—á–µ—Å–∫–∞—è –ø–µ—Ä–µ–º–µ–Ω–Ω–∞—è (–Ω–∞ —Å—Ç–µ–∫–µ), —Ç–æ –¥–ª—è —ç—Ç–æ–≥–æ –µ—Å—Ç—å memset(...). –ò–ª–∏, –Ω–∞ —Ö—É–¥–æ–π –∫–æ–Ω–µ—Ü - —Ü–∏–∫–ª.
–ù—É –∏ - –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –¥–ª—è —Ö—Ä–∞–Ω–µ–Ω–∏—è –∑–Ω–∞—á–µ–Ω–∏–π 0 –∏ 1 –ø–µ—Ä–µ–º–µ–Ω–Ω—ã–µ —Ç–∏–ø–∞ int –Ω–∞ 8-–±–∏—Ç–Ω–æ–º –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ!.... —Ç—É—Ç –¥–∞–∂–µ —Å–ª–æ–≤ –Ω–µ –Ω–∞—Ö–æ–¥–∏—Ç—Å—è
–£–∂ –Ω–µ –≥–æ–≤–æ—Ä—è –æ —Ç–æ–º, —á—Ç–æ —Ç–∞–º –∏ –º–∞—Å—Å–∏–≤ —Ç–æ –Ω–∏–∫–∞–∫–æ–π –Ω–µ –Ω—É–∂–µ–Ω. –ê –º–æ–∂–Ω–æ —Å—Ä–∞–∑—É –ø—Ä–æ—á–∏—Ç–∞—Ç—å –≤—Å–µ –Ω–æ–≥–∏.
–Ω–µ—Ç,—è –Ω–µ –≤–∏–∂—É –ø—Ä–æ–±–ª–µ–º –≤ —Ç–æ–º —á—Ç–æ —è –Ω–∞–ø–∏—Å–∞–ª.
1. –í—ã —á–∏—Ç–∞–µ—Ç–µ –Ω–µ –≤—Å–µ –ø–∏–Ω—ã —ç–Ω–∫–æ–¥–µ—Ä–∞ –æ–¥–Ω–æ–≤—Ä–µ–º–µ–Ω–Ω–æ, –∞ –æ—Ç–¥–µ–ª—å–Ω—ã–µ –ø–∏–Ω—ã –≤ —Ä–∞–∑–Ω–æ–µ –≤—Ä–µ–º—è. –ß—Ç–æ –ø—Ä–∏ –≤—Ä–∞—â–µ–Ω–∏–∏ —ç–Ω–∫–æ–¥–µ—Ä–∞ –º–æ–∂–µ—Ç –¥–∞–≤–∞—Ç—å "–Ω–µ–æ–∂–∏–¥–∞–Ω–Ω—ã–µ" —Ä–µ–∑—É–ª—å—Ç–∞—Ç—ã. –¢–µ–º –±–æ–ª–µ–µ —Å–∫–æ—Ä–æ—Å—Ç—å –ø—Ä–æ—Ö–æ–¥–∞ —Ü–∏–∫–ª–∞ main() —É –≤–∞—Å –Ω–∏–∫–∞–∫ –Ω–µ —Ñ–∏–∫—Å–∏—Ä–æ–≤–∞–Ω–∞, –∞ –∑–Ω–∞—á–∏—Ç –∫—Ä—É—Ç–∏—Ç—Å—è –æ–Ω –±—ã—Å—Ç—Ä–æ, —á–∏—Ç–∞—è –æ—Ç–¥–µ–ª—å–Ω—ã–µ –Ω–æ–≥–∏ –≤ —Ä–∞–∑–Ω–æ–µ –≤—Ä–µ–º—è.
–ö–∞–∫–æ–π —Å–º—ã—Å–ª –≤ —Ç–∞–∫–æ–º? –ü–æ—á–µ–º—É –Ω–µ –ø—Ä–æ—á–∏—Ç–∞—Ç—å —Å—Ä–∞–∑—É –≤—Å–µ –Ω–æ–≥–∏ –æ–¥–Ω–æ–π-–¥–≤—É–º—è –æ–ø–µ—Ä–∞—Ü–∏—è–º–∏ —á—Ç–µ–Ω–∏—è –ø–æ—Ä—Ç–∞?
2. –°–∫–æ—Ä–æ—Å—Ç—å –ø—Ä–æ—Ö–æ–¥–∞ —Ü–∏–∫–ª–∞ —Ç–æ–∂–µ –Ω–∏–∫–∞–∫ –Ω–µ —Ñ–∏–∫—Å–∏—Ä–æ–≤–∞–Ω–∞. –ò –º–æ–∂–µ—Ç –±–æ–ª—Ç–∞—Ç—å—Å—è –≤ —Ä–∞–∑–Ω—ã–µ —Å—Ç–æ—Ä–æ–Ω—ã.
3. (–°–∞–º–æ–µ –≥–ª–∞–≤–Ω–æ–µ) –£ –≤–∞—Å —ç–Ω–∫–æ–¥–µ—Ä - –º–µ—Ö–∞–Ω–∏—á–µ—Å–∫–∏–π? –ß—Ç–æ —Ç–∞–∫–æ–µ –¥—Ä–µ–±–µ–∑–≥ –∫–æ–Ω—Ç–∞–∫—Ç–æ–≤ - –∑–Ω–∞–µ—Ç–µ? –í —Ä–µ–∞–ª—å–Ω—ã—Ö –º–µ—Ö–∞–Ω–∏—á–µ—Å–∫–∏—Ö —ç–Ω–∫–æ–¥–µ—Ä–∞—Ö —ç—Ç–æ —Å–µ—Ä—å—ë–∑–Ω–∞—è –ø—Ä–æ–±–ª–µ–º–∞. –ò –µ—Å–ª–∏ —Å–Ω–∞—á–∞–ª–∞ (–ø–æ–∫–∞ –æ–Ω –Ω–æ–≤—ã–π –∏ –∫–æ–Ω—Ç–∞–∫—Ç—ã –Ω–µ —É—à–∞—Ç–∞–Ω–Ω—ã–µ) –≤—ã –µ—ë –º–æ–∂–µ—Ç–µ –Ω–µ –∑–∞–º–µ—á–∞—Ç—å (—Ç–æ–ª—å–∫–æ —Ä–µ–¥–∫–∏–µ –≥–ª—é–∫–∏), —Ç–æ –ø–æ—Ç–æ–º –¥–µ–ª–∞ —É—Ö—É–¥—à–∞—Ç—Å—è.
–ù–æ—Ä–º–∞–ª—å–Ω–∞—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏—è —á—Ç–µ–Ω–∏—è –ø–æ–∑–∏—Ü–∏–∏ —ç–Ω–∫–æ–¥–µ—Ä–∞ (–ø—Ä–æ–≥—Ä–∞–º–º–Ω–∞—è) - –Ω–∞–ø—Ä–∏–º–µ—Ä: –ü–µ—Ä–∏–æ–¥–∏—á–µ—Å–∫–æ–µ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–µ (–æ—Ç —Ç–∞–π–º–µ—Ä–∞). –í –∫–æ—Ç–æ—Ä–æ–º —Å —Ñ–∏–∫—Å–∏—Ä–æ–≤–∞–Ω–Ω–æ–π –∏–∑–≤–µ—Å—Ç–Ω–æ–π —á–∞—Å—Ç–æ—Ç–æ–π —á–∏—Ç–∞—é—Ç—Å—è —Å–∏–≥–Ω–∞–ª—ã —ç–Ω–∫–æ–¥–µ—Ä–∞ (–≤—Å–µ —Å—Ä–∞–∑—É). –î–µ–ª–∞–µ—Ç—Å—è –∏—Ö –∞–Ω–∞–ª–∏–∑ (–Ω–∞ –∫–æ—Ä—Ä–µ–∫—Ç–Ω–æ—Å—Ç—å). –î–µ–ª–∞–µ—Ç—Å—è –ø–æ–¥–∞–≤–ª–µ–Ω–∏–µ –¥—Ä–µ–±–µ–∑–≥–∞. –î–µ–ª–∞–µ—Ç—Å—è –∞–Ω–∞–ª–∏–∑ –Ω–∞ –∫–æ—Ä—Ä–µ–∫—Ç–Ω–æ—Å—Ç—å –∏–∑–º–µ–Ω–µ–Ω–∏—è —Å–æ—Å—Ç–æ—è–Ω–∏–π —ç–Ω–∫–æ–¥–µ—Ä–∞ (–ø—Ä–∏ –≤—Ä–∞—â–µ–Ω–∏–∏ –≤ –ª—é–±—É—é —Å—Ç–æ—Ä–æ–Ω—É –µ—Å—Ç—å –æ–ø—Ä–µ–¥–µ–ª—ë–Ω–Ω—ã–π –ø–æ—Ä—è–¥–æ–∫ —Å–º–µ–Ω—ã —Å–æ—Å—Ç–æ—è–Ω–∏–π —Å–∏–≥–Ω–∞–ª–æ–≤; –ü–û –¥–æ–ª–∂–Ω–æ –µ–≥–æ –∫–æ–Ω—Ç—Ä–æ–ª–∏—Ä–æ–≤–∞—Ç—å; –∏ –ø—Ä–∏ –Ω–∞—Ä—É—à–µ–Ω–∏–∏ - —Å–±—Ä–∞—Å—ã–≤–∞—Ç—å –∞–ª–≥–æ—Ä–∏—Ç–º —Ä–∞–±–æ—Ç—ã –≤ –∏—Å—Ö–æ–¥–Ω–æ–µ —Å–æ—Å—Ç–æ—è–Ω–∏–µ).
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
sanitar_zaz
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –∏—é–Ω 19, 2024 22:32:01
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 13, 2024 04:32:14–°–æ–æ–±—â–µ–Ω–∏–π: 37
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–∞ –ø—Ä–æ—á–∏—Ç–∞—Ç—å —Å—Ä–∞–∑—É –í–ï–°–¨ –ø–æ—Ä—Ç –∏ —Å—Ä–∞–∑—É –ø–æ–ª—É—á–∏—Ç—å –¥–≤–æ–∏—á–Ω—ã–π –∫–æ–¥ —É–º–∞ –Ω–µ —Ö–≤–∞—Ç–∞–µ—Ç?
–ø–æ—Å–º–æ—Ç—Ä–∏—Ç–µ –≤–Ω–∏–º–∞—Ç–µ–ª—å–Ω–æ,3 –Ω–æ–≥–∏ –Ω–∞ –ø–æ—Ä—Ç—É B,4 –Ω–æ–≥–∏ –Ω–∞ –ø–æ—Ä—Ç—É D
–¶–∏—Ç–∞—Ç–∞:
–ù—É –∏ - –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –¥–ª—è —Ö—Ä–∞–Ω–µ–Ω–∏—è –∑–Ω–∞—á–µ–Ω–∏–π 0 –∏ 1 –ø–µ—Ä–µ–º–µ–Ω–Ω—ã–µ —Ç–∏–ø–∞ int –Ω–∞ 8-–±–∏—Ç–Ω–æ–º –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä–µ
–Ω—É —Ç—É—Ç —Å–ø–æ—Ä–∏—Ç—å –Ω–µ –±—É–¥—É,–º–æ–π –ø—Ä–æ—ë–±–∏—â–µ.
–¶–∏—Ç–∞—Ç–∞:
1. –í—ã —á–∏—Ç–∞–µ—Ç–µ –Ω–µ –≤—Å–µ –ø–∏–Ω—ã —ç–Ω–∫–æ–¥–µ—Ä–∞ –æ–¥–Ω–æ–≤—Ä–µ–º–µ–Ω–Ω–æ, –∞ –æ—Ç–¥–µ–ª—å–Ω—ã–µ –ø–∏–Ω—ã –≤ —Ä–∞–∑–Ω–æ–µ –≤—Ä–µ–º—è. –ß—Ç–æ –ø—Ä–∏ –≤—Ä–∞—â–µ–Ω–∏–∏ —ç–Ω–∫–æ–¥–µ—Ä–∞ –º–æ–∂–µ—Ç –¥–∞–≤–∞—Ç—å "–Ω–µ–æ–∂–∏–¥–∞–Ω–Ω—ã–µ" —Ä–µ–∑—É–ª—å—Ç–∞—Ç—ã. –¢–µ–º –±–æ–ª–µ–µ —Å–∫–æ—Ä–æ—Å—Ç—å –ø—Ä–æ—Ö–æ–¥–∞ —Ü–∏–∫–ª–∞ main() —É –≤–∞—Å –Ω–∏–∫–∞–∫ –Ω–µ —Ñ–∏–∫—Å–∏—Ä–æ–≤–∞–Ω–∞, –∞ –∑–Ω–∞—á–∏—Ç –∫—Ä—É—Ç–∏—Ç—Å—è –æ–Ω –±—ã—Å—Ç—Ä–æ, —á–∏—Ç–∞—è –æ—Ç–¥–µ–ª—å–Ω—ã–µ –Ω–æ–≥–∏ –≤ —Ä–∞–∑–Ω–æ–µ –≤—Ä–µ–º—è.
—Ö–º,—è –Ω–µ –¥—É–º–∞–ª –≤ —Ç–∞–∫–æ–π –ø–ª–æ—Å–∫–æ—Å—Ç–∏.—è –∫–∞–∫-—Ç–æ –≤–æ—Å–ø—Ä–∏–Ω–∏–º–∞–ª —á—Ç–æ —Å–∫–æ—Ä–æ—Å—Ç—å –æ–¥–Ω–æ–π –∏—Ç–µ—Ä–∞—Ü–∏–∏ main –Ω–∞ —Å—Ç–æ–ª—å–∫–æ –≤–µ–ª–∏–∫–∞,—á—Ç–æ —Ñ–∏–∑–∏—á–µ—Å–∫–∏ –Ω–µ–≤–æ–∑–º–æ–∂–Ω–æ –∫—Ä—É—Ç–∞–Ω—É—Ç—å —ç–Ω–∫–æ–¥–µ—Ä –±—ã—Å—Ç—Ä–µ–µ,—á–µ–º –æ–Ω —Å–Ω–∏–º–µ—Ç –ø–æ–∫–∞–∑–∞–Ω–∏—è —Å–æ –≤—Å–µ—Ö –Ω–æ–≥.
–¶–∏—Ç–∞—Ç–∞:
–£ –≤–∞—Å —ç–Ω–∫–æ–¥–µ—Ä - –º–µ—Ö–∞–Ω–∏—á–µ—Å–∫–∏–π? –ß—Ç–æ —Ç–∞–∫–æ–µ –¥—Ä–µ–±–µ–∑–≥ –∫–æ–Ω—Ç–∞–∫—Ç–æ–≤ - –∑–Ω–∞–µ—Ç–µ? –í —Ä–µ–∞–ª—å–Ω—ã—Ö –º–µ—Ö–∞–Ω–∏—á–µ—Å–∫–∏—Ö —ç–Ω–∫–æ–¥–µ—Ä–∞—Ö —ç—Ç–æ —Å–µ—Ä—å—ë–∑–Ω–∞—è –ø—Ä–æ–±–ª–µ–º–∞. –ò –µ—Å–ª–∏ —Å–Ω–∞—á–∞–ª–∞ (–ø–æ–∫–∞ –æ–Ω –Ω–æ–≤—ã–π –∏ –∫–æ–Ω—Ç–∞–∫—Ç—ã –Ω–µ —É—à–∞—Ç–∞–Ω–Ω—ã–µ) –≤—ã –µ—ë –º–æ–∂–µ—Ç–µ –Ω–µ –∑–∞–º–µ—á–∞—Ç—å (—Ç–æ–ª—å–∫–æ —Ä–µ–¥–∫–∏–µ –≥–ª—é–∫–∏), —Ç–æ –ø–æ—Ç–æ–º –¥–µ–ª–∞ —É—Ö—É–¥—à–∞—Ç—Å—è.
–∑–Ω–∞—é –∫–æ–Ω–µ—á–Ω–æ.—ç–Ω–∫–æ–¥–µ—Ä –º–µ—Ö–∞–Ω–∏—á–µ—Å–∫–∏–π.—Å–æ –≤—Ä–µ–º–µ–Ω–µ–º –ø–µ—Ä–µ–π–¥—É –Ω–∞ –æ–ø—Ç–∏—á–µ—Å–∫–∏–π.–ø–æ–∫–∞ —ç—Ç–æ—Ç –µ—Å—Ç—å,–∏ –ø–æ–∫–∞ –æ–Ω –Ω–æ–≤—ã–π-–≤–æ–ø—Ä–æ—Å –¥—Ä–µ–±–µ–∑–≥–∞ –º–æ–∂–µ–º –∏–≥–Ω–æ—Ä–∏—Ä–æ–≤–∞—Ç—å.
–¶–∏—Ç–∞—Ç–∞:
–ù–æ—Ä–º–∞–ª—å–Ω–∞—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏—è —á—Ç–µ–Ω–∏—è –ø–æ–∑–∏—Ü–∏–∏ —ç–Ω–∫–æ–¥–µ—Ä–∞ (–ø—Ä–æ–≥—Ä–∞–º–º–Ω–∞—è) - –Ω–∞–ø—Ä–∏–º–µ—Ä: –ü–µ—Ä–∏–æ–¥–∏—á–µ—Å–∫–æ–µ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–µ (–æ—Ç —Ç–∞–π–º–µ—Ä–∞). –í –∫–æ—Ç–æ—Ä–æ–º —Å —Ñ–∏–∫—Å–∏—Ä–æ–≤–∞–Ω–Ω–æ–π –∏–∑–≤–µ—Å—Ç–Ω–æ–π —á–∞—Å—Ç–æ—Ç–æ–π —á–∏—Ç–∞—é—Ç—Å—è —Å–∏–≥–Ω–∞–ª—ã —ç–Ω–∫–æ–¥–µ—Ä–∞ (–≤—Å–µ —Å—Ä–∞–∑—É). –î–µ–ª–∞–µ—Ç—Å—è –∏—Ö –∞–Ω–∞–ª–∏–∑ (–Ω–∞ –∫–æ—Ä—Ä–µ–∫—Ç–Ω–æ—Å—Ç—å). –î–µ–ª–∞–µ—Ç—Å—è –ø–æ–¥–∞–≤–ª–µ–Ω–∏–µ –¥—Ä–µ–±–µ–∑–≥–∞. –î–µ–ª–∞–µ—Ç—Å—è –∞–Ω–∞–ª–∏–∑ –Ω–∞ –∫–æ—Ä—Ä–µ–∫—Ç–Ω–æ—Å—Ç—å –∏–∑–º–µ–Ω–µ–Ω–∏—è —Å–æ—Å—Ç–æ—è–Ω–∏–π —ç–Ω–∫–æ–¥–µ—Ä–∞ (–ø—Ä–∏ –≤—Ä–∞—â–µ–Ω–∏–∏ –≤ –ª—é–±—É—é —Å—Ç–æ—Ä–æ–Ω—É –µ—Å—Ç—å –æ–ø—Ä–µ–¥–µ–ª—ë–Ω–Ω—ã–π –ø–æ—Ä—è–¥–æ–∫ —Å–º–µ–Ω—ã —Å–æ—Å—Ç–æ—è–Ω–∏–π —Å–∏–≥–Ω–∞–ª–æ–≤; –ü–û –¥–æ–ª–∂–Ω–æ –µ–≥–æ –∫–æ–Ω—Ç—Ä–æ–ª–∏—Ä–æ–≤–∞—Ç—å; –∏ –ø—Ä–∏ –Ω–∞—Ä—É—à–µ–Ω–∏–∏ - —Å–±—Ä–∞—Å—ã–≤–∞—Ç—å –∞–ª–≥–æ—Ä–∏—Ç–º —Ä–∞–±–æ—Ç—ã –≤ –∏—Å—Ö–æ–¥–Ω–æ–µ —Å–æ—Å—Ç–æ—è–Ω–∏–µ).
—Å–ø–∞—Å–∏–±–æ,—è –ø–æ–¥—É–º–∞—é –Ω–∞–¥ —ç—Ç–∏–º.
–Ω–æ –¥–∞–≤–∞–π—Ç–µ –ø—Ä–µ–¥—Å—Ç–∞–≤–∏–º
—Å—Ñ–µ—Ä–∏—á–µ—Å–∫–æ–≥–æ –∫–æ–Ω—è –≤ –≤–∞–∫—É—É–º–µ —á—Ç–æ –ø–æ–∑–∏—Ü–∏–∏ —ç–Ω–∫–æ–¥–µ—Ä–∞ —Å—á–∏—Ç–∞–µ—Ç –Ω–æ—Ä–º–∞–ª—å–Ω–æ.—á—Ç–æ –¥–∞–ª—å—à–µ —Å –®–ò–ú–æ–º?–ø–æ—á–µ–º—É –ø—Ä–∏ –≤—Ä–æ–¥–µ –ª–∏–Ω–µ–π–Ω–æ—Å—Ç–∏ –¥–∞–Ω–Ω—ã—Ö,–∫–æ—Ç–æ—Ä—ã–µ –æ—Ç–¥–∞—ë—Ç –ø–æ—Ç–µ–Ω—Ü–∏–æ–º–µ—Ç—Ä(–≤ 3-–º —Å–æ–æ–±—â–µ–Ω–∏–∏ –æ–ø–∏—Å—ã–≤–∞–ª),–∑–Ω–∞—á–µ–Ω–∏–µ –¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç–∏ –∏–º–ø—É–ª—å—Å–∞ –¥–ª—è –¥–æ—Å—Ç–∏–∂–µ–Ω–∏—è –Ω—É–∂–Ω–æ–≥–æ –≤–æ–ª—å—Ç–∞–∂–∞ —Ç–∞–∫–æ–µ —Ä–∞–∑–Ω–æ–µ,—á—Ç–æ –Ω–µ –≤–∏–¥–Ω–æ –∑–∞–∫–æ–Ω–æ–º–µ—Ä–Ω–æ—Å—Ç–∏,–Ω–∞ —á—Ç–æ —É–º–Ω–æ–∂–∏—Ç—å –∫–æ–ª-–≤–æ –ø—Ä–æ–π–¥–µ–Ω–Ω—ã—Ö –ø–∏–Ω–æ–≤?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
akl
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –∏—é–Ω 20, 2024 08:16:52
–ö–∞—Ä–º–∞: 64
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1024
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –º–∞—Ä 07, 2008 06:54:43–°–æ–æ–±—â–µ–Ω–∏–π: 4376–û—Ç–∫—É–¥–∞: –ò–∂–µ–≤—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ö–∞–∫ –≤–∞—Ä–∏–∞–Ω—Ç.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
jcxz
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –∏—é–Ω 20, 2024 12:02:44
–ì–æ–≤–æ—Ä—è—â–∏–π —Å —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç–æ–º
–ö–∞—Ä–º–∞: -7
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 187
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –∞–≤–≥ 15, 2017 10:51:13–°–æ–æ–±—â–µ–Ω–∏–π: 1661
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ø–æ—Å–º–æ—Ç—Ä–∏—Ç–µ –≤–Ω–∏–º–∞—Ç–µ–ª—å–Ω–æ,3 –Ω–æ–≥–∏ –Ω–∞ –ø–æ—Ä—Ç—É B,4 –Ω–æ–≥–∏ –Ω–∞ –ø–æ—Ä—Ç—É D
–°–¥–µ–ª–∞—Ç—å 2 —á—Ç–µ–Ω–∏—è, –∫—ç–ø? –∞ –ø–æ—Ç–æ–º —Å–æ–µ–¥–∏–Ω–∏—Ç—å –¥–∞–Ω–Ω—ã–µ. –ù–µ—Ç, –Ω–∏–∫–∞–∫?
—Ö–º,—è –Ω–µ –¥—É–º–∞–ª –≤ —Ç–∞–∫–æ–π –ø–ª–æ—Å–∫–æ—Å—Ç–∏.—è –∫–∞–∫-—Ç–æ –≤–æ—Å–ø—Ä–∏–Ω–∏–º–∞–ª —á—Ç–æ —Å–∫–æ—Ä–æ—Å—Ç—å –æ–¥–Ω–æ–π –∏—Ç–µ—Ä–∞—Ü–∏–∏ main –Ω–∞ —Å—Ç–æ–ª—å–∫–æ –≤–µ–ª–∏–∫–∞,—á—Ç–æ —Ñ–∏–∑–∏—á–µ—Å–∫–∏ –Ω–µ–≤–æ–∑–º–æ–∂–Ω–æ –∫—Ä—É—Ç–∞–Ω—É—Ç—å —ç–Ω–∫–æ–¥–µ—Ä –±—ã—Å—Ç—Ä–µ–µ,—á–µ–º –æ–Ω —Å–Ω–∏–º–µ—Ç –ø–æ–∫–∞–∑–∞–Ω–∏—è —Å–æ –≤—Å–µ—Ö –Ω–æ–≥.
–ü—Ä–∏—á—ë–º —Ç—É—Ç "—Å–Ω–∏–º–µ—Ç –ø–æ–∫–∞–∑–∞–Ω–∏—è —Å–æ –≤—Å–µ—Ö –Ω–æ–≥"? –Ø –≥–æ–≤–æ—Ä–∏–ª –æ —Ç–æ–º, —á—Ç–æ —É –≤–∞—Å –æ—Ç–¥–µ–ª—å–Ω—ã–µ —Å–∏–≥–Ω–∞–ª—ã –æ–±—â–µ–π –ø–∞—Ä–∞–ª–ª–µ–ª—å–Ω–æ–π —à–∏–Ω—ã —Å–Ω–∏–º–∞—é—Ç—Å—è –≤ —Ä–∞–∑–Ω–æ–µ –≤—Ä–µ–º—è. –ë–µ–∑ –∫–∞–∫–æ–≥–æ-—Ç–æ —Å–∏–Ω—Ö—Ä–æ—Å–∏–≥–Ω–∞–ª–∞. –ü—Ä–∏ –Ω–∞–ª–∏—á–∏–∏ –¥–∞–∂–µ –º–∏–Ω–∏–º–∞–ª—å–Ω–æ–≥–æ –¥—Ä–µ–±–µ–∑–≥–∞ –º–æ–∂–µ—Ç–µ –ø–æ–ª—É—á–∞—Ç—å —Å—Ç—Ä–∞–Ω–Ω—ã–µ –∑–Ω–∞—á–µ–Ω–∏—è.
–∑–Ω–∞—á–µ–Ω–∏–µ –¥–ª–∏—Ç–µ–ª—å–Ω–æ—Å—Ç–∏ –∏–º–ø—É–ª—å—Å–∞ –¥–ª—è –¥–æ—Å—Ç–∏–∂–µ–Ω–∏—è –Ω—É–∂–Ω–æ–≥–æ –≤–æ–ª—å—Ç–∞–∂–∞ —Ç–∞–∫–æ–µ —Ä–∞–∑–Ω–æ–µ,—á—Ç–æ –Ω–µ –≤–∏–¥–Ω–æ –∑–∞–∫–æ–Ω–æ–º–µ—Ä–Ω–æ—Å—Ç–∏,–Ω–∞ —á—Ç–æ —É–º–Ω–æ–∂–∏—Ç—å –∫–æ–ª-–≤–æ –ø—Ä–æ–π–¥–µ–Ω–Ω—ã—Ö –ø–∏–Ω–æ–≤?
–°–Ω–∞—á–∞–ª–∞ –≤–∞–º –Ω—É–∂–Ω–æ –ø—Ä–∏–≤–µ—Å—Ç–∏ –∫–æ–¥ –≤ –ø–æ—Ä—è–¥–æ–∫. –¢–∞ –∫—É—á–∞, —á—Ç–æ —É –≤–∞—Å –Ω–∞–≤–∞–ª–µ–Ω–∞ - —Å–æ–≤–µ—Ä—à–µ–Ω–Ω–æ –Ω–µ—á–∏—Ç–∞–µ–º–∞. –°–Ω–∞—á–∞–ª–∞ –∫–æ–¥ –Ω—É–∂–Ω–æ –Ω–æ—Ä–º–∞–ª—å–Ω–æ –æ—Ñ–æ—Ä–º–∏—Ç—å (—Å–æ –≤—Å–µ–º –Ω—É–∂–Ω—ã–º —Ñ–æ—Ä–º–∞—Ç–∏—Ä–æ–≤–∞–Ω–∏–µ–º; —É–±–∏—Ä–∞–Ω–∏–µ–º –∑–∞–∫–æ–º–º–µ–Ω—Ç–∏—Ä–æ–≤–∞–Ω–Ω–æ–≥–æ –º—É—Å–æ—Ä–∞; —É–±–∏—Ä–∞–Ω–∏–µ–º –ø–æ—Ä—Ç—è–Ω–æ–∫ –ª–∏–Ω–µ–π–Ω–æ–≥–æ –∫–æ–¥ –≤–º–µ—Å—Ç–æ —Ü–∏–∫–ª–æ–≤ –∏ —Ç.–¥.). –¢–æ–≥–¥–∞ –∏ –º–æ–∂–µ—Ç –∏ –ø—Ä–æ–±–ª–µ–º–∞ —Å—Ç–∞–Ω–µ—Ç —Å—Ä–∞–∑—É –≤–∏–¥–Ω–∞. –ê –≤ –≤–∞—à–µ–π –∫—É—á–µ –ø–æ—á—Ç–∏ –Ω–∏—á–µ–≥–æ –Ω–µ –≤–∏–¥–Ω–æ.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Energizer-A
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –∏—é–Ω 20, 2024 13:09:13
–í—ã–º–æ–≥–∞—Ç–µ–ª—å –ø—Ä–∏–ø–æ—è
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 129
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –º–∞—Ä 03, 2015 20:13:46–°–æ–æ–±—â–µ–Ω–∏–π: 617–û—Ç–∫—É–¥–∞: —Ä—è–¥–æ–º —Å "–Ω–µ —Ä–µ–∑–∏–Ω–æ–≤–æ–π" –∂–∏–≤—É –≤ –¥–µ—Ä–µ–≤–Ω–µ
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
jcxz –ø–∏—Å–∞–ª(–∞):
–ë–µ–∑ –∫–∞–∫–æ–≥–æ-—Ç–æ —Å–∏–Ω—Ö—Ä–æ—Å–∏–≥–Ω–∞–ª–∞. –ü—Ä–∏ –Ω–∞–ª–∏—á–∏–∏ –¥–∞–∂–µ –º–∏–Ω–∏–º–∞–ª—å–Ω–æ–≥–æ –¥—Ä–µ–±–µ–∑–≥–∞ –º–æ–∂–µ—Ç–µ –ø–æ–ª—É—á–∞—Ç—å —Å—Ç—Ä–∞–Ω–Ω—ã–µ –∑–Ω–∞—á–µ–Ω–∏—è.
–ú–æ–π —Å–∫—Ä–æ–º–Ω—ã–π –æ–ø—ã—Ç –ø—Ä–æ–±—ã –ø–µ—Ä–∞ —Å —ç–Ω–∫–æ–¥–µ—Ä–æ–º, –≥–æ–≤–æ—Ä–∏—Ç —Ä–æ–≤–Ω–æ —Ç–æ–∂–µ.. –¥—Ä–µ–±–µ–∑–≥ –±–æ–ª—å—à—É—â–∞—è –ø—Ä–æ–±–ª–µ–º–∞ –∏ –µ—Å–ª–∏ –µ—Å—Ç—å –≤–∞—Ä–∏–∞–Ω—Ç —Å–¥–µ–ª–∞—Ç—å —Ñ–∏–ª—å—Ç—Ä–∞—Ü–∏—é –∑–∞ –ø—Ä–µ–¥–µ–ª–∞–º–∏ –∫–æ–Ω—Ç—Ä–æ–ª—ë—Ä–∞ - —ç—Ç–æ –Ω—É–∂–Ω–æ —Å–¥–µ–ª–∞—Ç—å.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
sanitar_zaz
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –∏—é–Ω 20, 2024 21:16:15
–ü–µ—Ä–≤—ã–π —Ä–∞–∑ —Å–∫–∞–∑–∞–ª –ú—è—É!
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —è–Ω–≤ 13, 2024 04:32:14–°–æ–æ–±—â–µ–Ω–∏–π: 37
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ö–∞–∫ –≤–∞—Ä–∏–∞–Ω—Ç.
—Å–ø–∞—Å–∏–±–æ,–Ω–æ –Ω–µ —Å–æ–≤—Å–µ–º.–≤–æ-–ø–µ—Ä–≤—ã—Ö 256 —ç—Ç–æ —á—Ç–æ?
–≤–æ-–≤—Ç–æ—Ä—ã—Ö –µ—Å–ª–∏ –±—Ä–∞—Ç—å –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ–µ –∑–Ω–∞—á–µ–Ω–∏–µ,—Ç–æ —Ç–∞–º 96 –ø–∏–Ω–æ–≤,–∏ OCR1A=1080*96/256=405,–∞ –≤ —Å–≤–æ—é –æ—á–µ—Ä–µ–¥—å OCR1A=405 –¥–∞—ë—Ç 3.64–í,–≤ —Ç–æ –≤—Ä–µ–º—è –∫–∞–∫ –ø—Ä–∏ 96 –ø–∏–Ω–∞—Ö –¥–æ–ª–∂–Ω–æ –±—ã—Ç—å 3.85–í
–∏ –ø—Ä–æ –º–∏–Ω–∏–º–∞–ª—å–Ω–æ–µ —è —Ç–æ–∂–µ –Ω–µ –ø–æ–Ω—è–ª,–ø–æ—á–µ–º—É —É –Ω–∞—Å –º–∏–Ω–∏–º–∞–ª—å–Ω—ã–π —É–≥–æ–ª –ø–æ–≤–æ—Ä–æ—Ç–∞ —Å–æ—Å—Ç–∞–≤–ª—è–µ—Ç 16 –ø–∏–Ω–æ–≤?16 –ø–∏–Ω–æ–≤ —ç—Ç–æ –º—ã —É–∂–µ –Ω–∞ 45 –≥—Ä–∞–¥—É—Å–æ–≤ –ø–æ–≤–µ—Ä–Ω—É–ª–∏ —ç–Ω–∫–æ–¥–µ—Ä.
–¶–∏—Ç–∞—Ç–∞:
–°–¥–µ–ª–∞—Ç—å 2 —á—Ç–µ–Ω–∏—è, –∫—ç–ø? –∞ –ø–æ—Ç–æ–º —Å–æ–µ–¥–∏–Ω–∏—Ç—å –¥–∞–Ω–Ω—ã–µ. –ù–µ—Ç, –Ω–∏–∫–∞–∫?
—Ç–∞ "–∫–∞–∫",–∫–æ–Ω–µ—á–Ω–æ,—á–µ–≥–æ –∂ –Ω–∏–∫–∞–∫))
–µ—Å–ª–∏ —É—Å–ø–µ—é-—Å–µ–≥–æ–¥–Ω—è –ø–µ—Ä–µ–¥–µ–ª–∞—é –∏ –≤—ã–ª–æ–∂—É.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
akl
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: —Å—Ç—Ä–∞–Ω–Ω–æ–µ –ø–æ–≤–µ–¥–µ–Ω–∏–µ –®–ò–ú,–≤–æ–∑–º–æ–∂–Ω–æ –¥–µ–ª–æ –≤ –∫–æ–¥–µ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –∏—é–Ω 21, 2024 07:02:43
–ö–∞—Ä–º–∞: 64
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1024
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –º–∞—Ä 07, 2008 06:54:43–°–æ–æ–±—â–µ–Ω–∏–π: 4376–û—Ç–∫—É–¥–∞: –ò–∂–µ–≤—Å–∫
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
sanitar_zaz –ø–∏—Å–∞–ª(–∞):
...256 —ç—Ç–æ —á—Ç–æ?
–¢–∏–ø–æ–≤–æ–π –ø—Ä–∏–µ–º —É—Ö–æ–¥–∞ –æ—Ç –¥—Ä–æ–±–Ω—ã—Ö –∑–Ω–∞—á–µ–Ω–∏–π. –í—Ä—è–¥ –ª–∏ —É–¥–æ–±–Ω–µ–µ —É–º–Ω–æ–∂–∞—Ç—å 1080/256=4,21875.
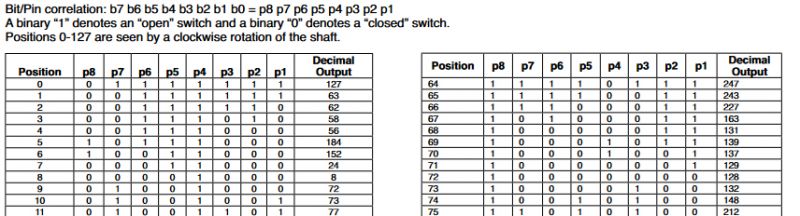
–ö–∞–∫ —Å–ª–µ–¥—É–µ—Ç –∏–∑ –∫–∞—Ä—Ç–∏–Ω–∫–∏ –∏ —Ç–µ–∫—Å—Ç–∞ –ø—Ä–æ–≥—Ä–∞–º–º—ã –±–µ—Ä–µ—Ç—Å—è –∫–æ–¥–∏—Ä–æ–≤–∫–∞ –±–µ–∑ —Å–º–µ—â–µ–Ω–∏—è, —Ç.–µ. —Å–µ—Ä–µ–¥–∏–Ω–∞ –ø–æ–ª–æ–∂–µ–Ω–∏—è —ç–Ω–∫–æ–¥–µ—Ä–∞ 64 —à–∞–≥–∞, –∞ –Ω–µ 48. –ö–∞–∫ –≤–∞—Ä–∏–∞–Ω—Ç, —Å–º–µ—Å—Ç–∏—Ç—å —Ç–∞–±–ª–∏—Ü—É –∫–æ–¥–∏—Ä–æ–≤–∫–∏ –Ω–∞ 16 —à–∞–≥–æ–≤.
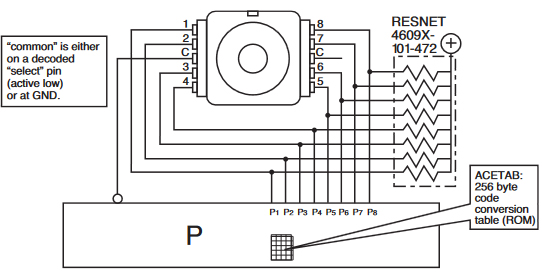
–ú–æ–π –æ–ø—ã—Ç –ø—Ä–∏–º–µ–Ω–µ–Ω–∏—è —Ç–∞–∫–æ–≥–æ —ç–Ω–∫–æ–¥–µ—Ä–∞ - —Ä–µ–∑–∏—Å—Ç–æ—Ä—ã —É–º–µ–Ω—å—à–∏—Ç—å –¥–æ 1–∫ –∏ –æ–ø—Ä–æ—Å –æ—Å—É—â–µ—Å—Ç–≤–ª—è—Ç—å –∏–º–ø—É–ª—å—Å–æ–º |_| –ª–∞–ø–æ–π, –ø–æ–¥–∫–ª—é—á–µ–Ω–Ω–æ–π –∫ (C)COM.
–í–ª–æ–∂–µ–Ω–∏–µ:
EAW0J_01.jpg [76.13 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 60
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 1 –∏–∑ 1
[ –°–æ–æ–±—â–µ–Ω–∏–π: 19 ]
–ö—Ç–æ —Å–µ–π—á–∞—Å –Ω–∞ —Ñ–æ—Ä—É–º–µ
–°–µ–π—á–∞—Å —ç—Ç–æ—Ç —Ñ–æ—Ä—É–º –ø—Ä–æ—Å–º–∞—Ç—Ä–∏–≤–∞—é—Ç: –Ω–µ—Ç –∑–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω–Ω—ã—Ö –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª–µ–π –∏ –≥–æ—Å—Ç–∏: 24
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –Ω–∞—á–∏–Ω–∞—Ç—å —Ç–µ–º—ã–Ω–µ –º–æ–∂–µ—Ç–µ –æ—Ç–≤–µ—á–∞—Ç—å –Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —É–¥–∞–ª—è—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ –¥–æ–±–∞–≤–ª—è—Ç—å –≤–ª–æ–∂–µ–Ω–∏—è














")

